
Monte Carlo Orbit Determination for Small-Body Science
Classical orbit determination (OD) techniques—such as batch least-squares and Kalman filtering—rely on local linearization and Gaussian uncertainty assumptions. Around small bodies or in weak-dynamics regimes, these assumptions often break down, leading to biased estimates, underestimated uncertainty, or failure to converge.
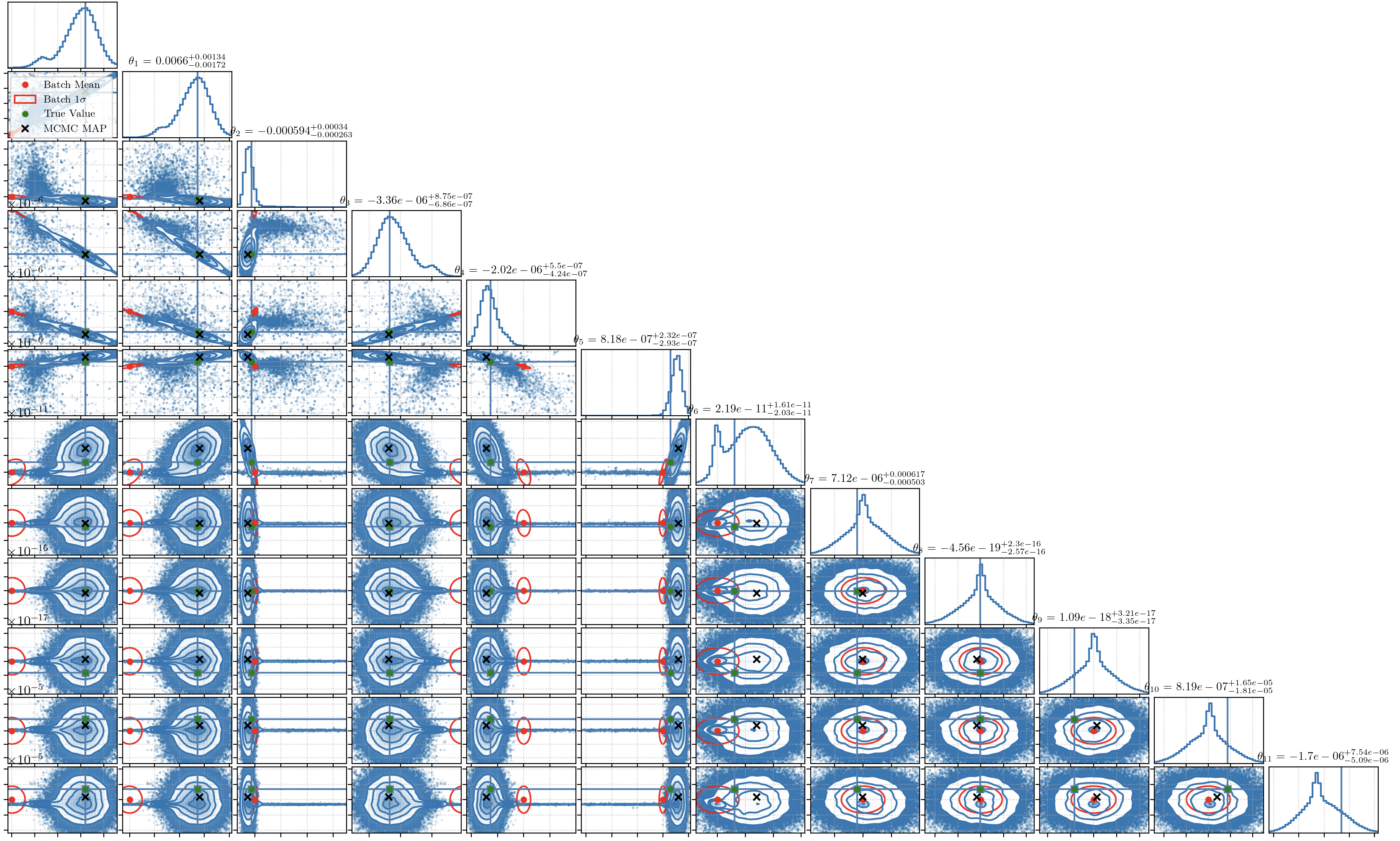
This work develops a Monte Carlo–based OD framework capable of resolving fully nonlinear, non-Gaussian posteriors for astrodynamics problems where traditional estimators struggle. The method employs an affine-invariant ensemble Markov Chain Monte Carlo (MCMC) sampler (Goodman & Weare) to efficiently explore highly correlated and multi-modal parameter spaces typical of small-body environments.
Key features include:
- MAP-based initialization to reduce burn-in
- State-space whitening for enhanced sampling efficiency
- High-order State Transition Tensors (STTs) to propagate nonlinear deviations around a reference, drastically reducing integration cost
- Convergence diagnostics and posterior validation routines for robustness
A demonstration case involving optical tracking of a surface particle ejected from asteroid Bennu highlights the method’s strengths. Even with sparse angular (RA/DEC) data and highly nonlinear dynamics, the framework resolves accurate posteriors and avoids local-minimum lock-in—a common failure mode in Gaussian estimators.
The toolset is being expanded into an open-source, modular OD library, supporting hybrid inference architectures and future extensions to small-body gravity science, density inference, and autonomous navigation.
📝 Related Publications
- Efficient Posterior Sampling for Small-Body Orbit Determination
G. Fereoli, J. McMahon
In preparation (target venue TBD) — In preparation